УДК 62-50
КОРРЕКЦИЯ НЕЛИНЕЙНОЙ ХАРАКТЕРИСТИКИ ТИПА «РЕЛЕ С ЗОНОЙ НЕЧУВСТВИТЕЛЬНОСТИ»
Бобриков С.А., Пичугин Е.Д.
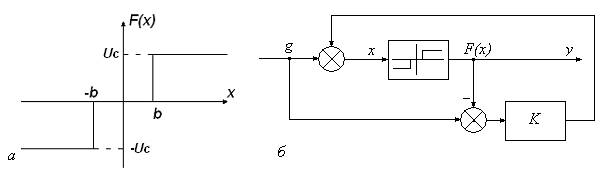
В [1] описан метод коррекции характеристик элементов системы управления, позволяющий улучшить как статические, так и динамические свойства элементов системы. Однако, как показано ниже, скорректировать указанным методом характеристику типа «насыщение», охватывая корректирующей связью элемент с подобной характеристикой, невозможно. На рис.1а приведена статическая характеристика реле, на рис.1б - схема системы коррекции элемента с релейной характеристикой.
![]()
Как указано в [1] величина коэффициента K должна быть как можно больше (например, K=100). Определим входную величину реле x (рис.1б):
x=g+K[g-F(x)]=g(K+1)-KF(x).
При подаче на вход системы ступенчатого сигнала реле включится, если будет выполнено условие: x<- b, либо x > b. Пусть x > b и реле включилось, при этом F(x)= Uc. Если KUc > g(K+1), то входная величина реле x поменяет свой знак и реле переключится в противоположном направлении. Теперь F(x) = -Uc, x > 0 и реле вновь включится в положительном направлении и т.д. В системе устанавливаются колебания, система не работоспособна.
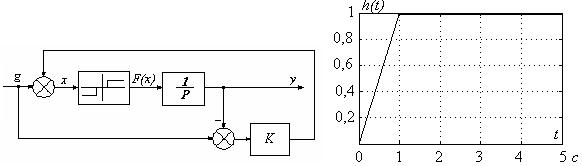
Рис.2. Схема коррекции реле с интегратором Рис.3. Переходная характеристика
системы коррекции по рис.2
Покажем, что скорректировать релейную характеристику можно, если последовательно с реле включить интегратор. Схема подобной коррекции показана на рис.2. При подаче на вход системы ступенчатого сигнала (например, положительного) реле включается в положительном направлении. Выходная величина y начинает изменяться следующим образом:  . Входная величина реле x при этом равна
. Входная величина реле x при этом равна
![]() .
.
С течением времени x уменьшается и при условии, что x < b реле отключится. При этом
![]() . Так как K>>1, то можно записать:
. Так как K>>1, то можно записать: ![]() , откуда следует:
, откуда следует:
![]() y≈g.
y≈g.
На рис.3 показана переходная характеристика, полученная для схемы рис.2 при следующих численных значениях параметров схемы: b=2, Uc=1, g=1, K=100.
В качестве примера рассмотрим систему управления, в которой роль исполнительного механизма выполняет двигатель, управляемый трехпозиционным реле. При наличии зоны нечувствительности (в некоторых случаях она необходима для устранения возможных автоколебаний) система управления становится нечувствительной к малым изменениям ошибки управления, точность регулирования при этом не может быть высокой. Примером может служить система регулирования температуры газовой печи. В таких системах для коррекции нелинейной характеристики реле может быть использован метод, описанный выше.

Рис.4. Функциональная схема системы управления
Функциональная схема системы приведена на рис.4. На схеме приняты следующие обозначения:
1 – задающее устройство;
2 – предварительный усилитель-преобразователь;
3 – усилитель мощности с релейной характеристикой;
4 – исполнительный двигатель с регулирующим органом;
5 – объект управления с измерительным устройством.
Структурная схема системы представлена на рис.5.

Рис.5. Структурная схема системы регулирования температуры
Структурная схема системы с корректирующей связью показана на рис.6. Сигнал, подаваемый на вход корректирующей цепи, снимается с выхода регулирующего органа, что физически может быть реализовано.
Путем моделирования установлено, что в качестве звена с «желаемой» передаточной функцией (звено 6 на рис.6) наилучший результат получается при условии, что передаточная функция звена 6 равна
![]() .
.
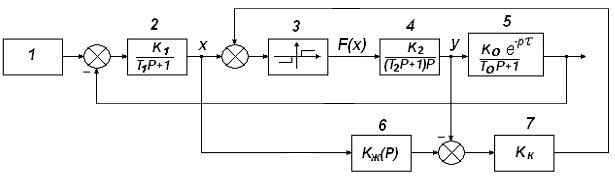
Рис.6. Структурная схема системы с коррекцией участка цепи
с нелинейной характеристикой
Звено 7 – пропорциональное - KK =(50 – 100).
На рис.7 приведена переходная характеристика, полученная при следующих значениях параметров системы: K1=1; T1=0,1; K2=1; T2=0,2; Ko=1; To=5c; t=2c; K3=1; K4=0,18. Статическая характеристика релейного звена показана на рис.1а. Изменение зоны нечувствительности b в пределах от нуля до ±5 практически не влияет на вид переходной характеристики. На рис.8 приведена статическая характеристика участка цепи, охваченного компенсирующей связью - от точки x до точки y (рис.6).
|
The methods of corrections of object’s characteristics are dicsussed
1. Бобриков С.А., Пичугин Е.Д. Коррекция характеристик элементов системы управления // Автоматика, автоматизация, электротехнические комплексы и системы.- 2003.- №1(11).-С.10-14.
Ответы на вопросы [_Задать вопроос_]
Читайте также
Методы построения адаптивных систем управления
Михайленко В.С., Ложечников В.Ф. Методы настройки нечеткого адаптивного ПИД-регулятораЩокін В.П., Сушенцев О.О., Коломіц Г.В. Інтелектуальна система управління з нечітким адаптивним емулятором
Михайленко В.С., Ложечников В.Ф. Анализ методов разработки нечетких САР для управления сложными взаимосвязанными объектами
Кучеров Д.П., Василенко А.В., Иванов Б.П. Алгоритм адаптивного терминального управления динамической системой с элементом дифференцирования
Клименко А.К. О получении желаемых показателей качества адаптивной системы с обратной моделью
Шутеев Э.И., Белокопытов Д.О. Определение постоянной составляющей сигналов методом адаптации
Митрахович М.М. Интеграция методов при синтезе сложных систем в условиях априорной неопределенности
Клименко А.К. Об устранении колебательности адаптивной системы в промежутках дискретного времени
Балтовский А.А. Выбор критериев эффективности функционирования адаптивной автоматизированной системы управления, ее подсистем и промышленного производства
Малахов В.П., Ситников В.С., Яковлева И.Д. Адаптивная перестройка цифрового фильтра в системе автоматического управления.
Клименко А.К. Об обеспечении сходимости процесса адаптации посредством воспроизведения измерительной программы в обратном времени.
Михайленко В.С., Никольский В.В. Использование нечеткой адаптивной системы управления для компьютерного мониторинга сетью котельных установок
Ковриго Ю.М., Мовчан А.П., Полищук И.А., Фоменко Б.В. Адаптивное управление теплоэнергетическими процессами
Клименко А.К. Об ускорении сходимости процессов в адаптивной системе с обратной моделью
Вишневский Л.В., Веретенник А.М., Войтецкий И.Е. Выбор критерия для оценки процесса включения генераторов на параллельную работу
Носов П.С. Принятие адаптивной стратегии при формировании траектории обучения в пространстве.
Ковриго Ю.М., Фоменко Б.В., Поліщук І.А. Адаптивна система регулювання витрати палива.
Кучеров Д.П. Cинтез адаптивной квазиоптимальной по быстродействию системы управления при входном воздействии вида квадратичной функции и наличии ограниченных помех.
Клименко А.К. Об оптимизации коэффициента усиления в адаптивной системе с обратной моделью.
Ладанюк А.П., Заєць Н.А., Луцька Н.М. Застосування адаптивних систем керування для нестаціонарних об'єктів технологічних комплексів неперервного типу.
Ковриго Ю.М., Мовчан А.П., Полищук И.А. Метод построения самонастраивающихся регуляторов для промышленного применения.
Балтовский А.А. Способ адаптивной алгоритмизации задач расчета производст-венной программы.
Орлов В.В. Эффективность адаптивных фильтров при расстройке принимаемого и опорных сигналов.